4关节,6关节机器人的同学,进来看看
正在跟导师研究4关节,6关节机器人的同学,你们刚开始涉及到这个,先从正运动学开始,接着逆运动学,直线插补,圆弧插补,姿态插补,在后面涉及到速度规划,有梯形加减速,正弦速度规划,7段S型速度规划,后面有工具坐标系标定,用户坐标系标定,在后面是轨迹平滑过渡,接着做具体的应用,码垛功能包,焊接(外加两个轴的变位机)功能包,喷涂,打磨,跟机器视觉联系在一起,以及高大上的动力学规划等等,我这里都有成熟的算法,如果你正在研究,可以联系我,zkwrobot@126.com,或微信13270129865。
有需要参考文献的,来这里下载
链接: http://pan.baidu.com/s/1bppf37x 密码: 62ta
[ Last edited by JumperKai on 2017-6-8 at 10:59 ]![]() 返回小木虫查看更多
返回小木虫查看更多
今日热帖






自学可以吗导师没选,只是自己想用三年学这个。。。
大哥你这个帖子的意思是?
没有别的意思,为刚刚接触机器人行业的同学提供一点方向,协助他们编写matlab代码和写文章。
【前言】6轴工业机械臂运动控制
链接:http://www.jyguagua.com/?p=1542
前言
2013年初,老板对我说,公司今后打算研发6轴工业机械臂,你要看看机器人方面的书籍。一开始我以为要我看看资料,等老外的代码过来我好维护,因为只有懂得原理才能看懂代码才能在此基础上进行修改。后来才知道不是这样的,代码必须要自己写。当初看着老板给我演示的视频,我都害怕,我想自己能写出这样的算法实现对6轴机械臂的控制吗?
随着研究的深入,到现在应用我们的控制器rPAC540+伺服驱动+ABB本体已经实现直线,圆弧,姿态的规划。这些成果将在以后上传一些视频。在写代码之前我得阅读大量的参考文献,写好代码就是不停的在线调试,修改,事后我有想过将自己看到的应用到的算法整理下来,更有一股冲动想发表论文,后来发现不切实际,我要给版面费给出版商,我也不要名,所以放弃了。一方面供自己以后查阅去完善修改代码,另一方面也供同行之间去讨论,毕竟这样技术才会做广做深。
我写的这些技术文档首先申明一下,由于涉及到公司的利益,我不会过多的阐述核心算法,当然我会提到一些思路。我可以上传一些demo,但不会源码提供。如果你感兴趣,我们可以互相讨论,我的邮箱是:zkwrobot@126.com。
这一课题适合正在研究机械臂运动控制算法的学生,也适合研究所,公司里的算法工程师,当然您如果是这方面的专家看到这样的文章,请多多指教!
由于公司项目的不确定因素,我更新可能不会那么准时,但是只要我有空闲,我会写下去的。
那就让我们开始第一章吧,如何根据机械臂结构本体,建立D-H参数模型。
2014.6.3
周开武
第一讲 6关节机器人DH参数模型的建立
离上一次写这样的文章已经快接近3年了,突然又想继续,是最近在小木虫上发帖子,有几个研究生同学的交流,萌生出继续下去的想法。
我们基于的平台是CODESYS(LINUX) + QT。
6关节机器人这块事情从2013年开始差不多4年多的样子,初步的成果就是实现了基本的运动学功能,正逆解,逆解2种方法,直线插补,圆弧插补,姿态插补,工具坐标系标定,用户坐标系标定,其中最难的要数从MOVJ到MOVL的平滑过渡。码垛功能包,焊接功能包(只做摆焊功能)。高大上的动力学还正在研究中。其他不必多说,直接来到最初始的第一讲,DH参数模型的建立。
提到DH参数模型,我刚开始接触的第一本教材就是《机器人学导论》,没错,就是他。
图1
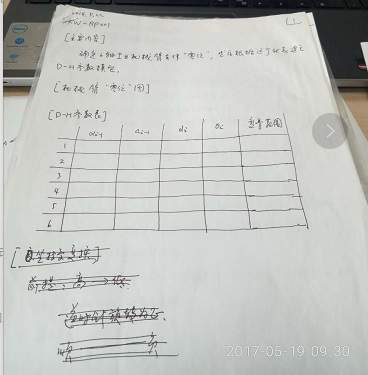
这本书我也就是重点看了第二章,第三章,第四章。由于本科专业学的是数学与应用数学,所以上手还比较快。特别是刚开始接触机器人的朋友们,第三章要好好阅读,他告诉了我们怎么建立DH参数模型的步骤,方法。最后你能够填写下面的表格,那说明你基本理解了,但不代表你完全理解,因为到后面的正逆运动学,你还要把这块知识拿过来,那时你的理解会更加深一步。
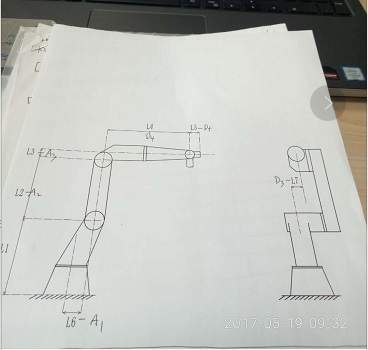
图2
图3
这一讲与后面的正运动学是紧密联系在一起的,能够正确填写上面的表格,理解各个参数的意思,以及建立DH参数模型的方法,你也就会了。
1.jpg
2.jpg
3.jpg
,
不错不错,一直想学算法的