mechanism and machine theory收到审稿意见之后不知所措
脥露赂氓脠媒赂枚脭脗脮没拢卢脡贸赂氓脪芒录没禄脴脌麓脕脣拢卢赂酶脕脣赂枚Minor revision拢卢脡贸赂氓脠脣赂脨戮玫脪虏禄鹿脥娄潞脙碌脛拢卢虏禄鹿媒赂酶脕脣脢庐露脿脤玫脡贸赂氓脪芒录没拢卢脫脨脨漏虏禄脰陋碌脌脠莽潞脦脨脼赂脛碌脛拢卢赂脙脠莽潞脦脢脟潞脙掳隆拢驴拢驴
虏禄脰陋碌脌脫脨脙禄脫脨脛脛脦禄麓贸脡帽脛脺赂酶碌茫戮颅脩茅脰庐脤赂拢卢赂脙脠莽潞脦赂霉戮脻脡贸赂氓脪芒录没陆酶脨脨脨脼赂脛拢卢脨猫脪陋脨漏脢虏脙麓脦脛录镁掳隆拢驴脨隆脣露碌脷脪禄麓脦脥露赂氓拢卢脢虏脙麓露录虏禄禄谩隆拢
脕铆脥芒拢卢卤脿录颅戮脥赂酶脕脣脪禄赂枚脡贸赂氓脠脣碌脛脪芒录没拢卢脢脟脕铆脪禄赂枚戮脥脪脩戮颅脥卢脪芒陆脫脢脮脕脣拢驴
路脟鲁拢赂脨脨禄拢隆拢隆
Dear Dr. ###,
Reviewers have now commented on your paper. You will see that they are advising that you revise your manuscript. If you are prepared to undertake the work required, I would be pleased to reconsider my decision.
For your guidance, reviewers' comments are appended below.
If you decide to revise the work, please submit a list of changes or a rebuttal against each point which is being raised when you submit the revised manuscript.
To submit a revision, please go to https://ees.elsevier.com/mechmt/ and login as an Author. Please submit your revision by May 17, 2016
On your Main Menu page is a folder entitled "Submissions Needing Revision". You will find your submission record there.
Mechanism and Machine Theory features the Interactive Plot Viewer, see: https://www.elsevier.com/interactiveplots. Interactive Plots provide easy access to the data behind plots. To include one with your article, please prepare a .csv file with your plot data and test it online at https://authortools.elsevier.com/interactiveplots/verification before submission as supplementary material.
Yours sincerely,
Paulo Flores, Ph.D
Editor in Chief
Mechanism and Machine Theory
Note: While submitting the revised manuscript, please double check the author names provided in the submission so that authorship related changes are made in the revision stage. If your manuscript is accepted, any authorship change will involve approval from co-authors and respective editor handling the submission and this may cause a significant delay in publishing your manuscript.
Reviewers' comments:
Reviewer #2:
The authors investigate on the design and optimization of cam-linkage systems for gait rehabilitation. The manuscript is interesting and relevant for the readership of Mechanism and Machine Theory journal, being well organized and written in a satisfactory manner.
The method is based on the kinematics of motion, and considers as main parameters of design the cam variables and human gait parameters. The optimization is based on satisfying several constraints. The objective function minimizes size and optimizes operating parameters.
The manuscript can be accepted for publication after the following issues have been fully addressed:
1.
2.
3.
...
13.
...![]() 返回小木虫查看更多
返回小木虫查看更多





脟毛脦脢拢卢脛脛脦禄脫脨戮颅脩茅碌脛麓贸脡帽脛脺虏禄脛脺赂酶碌茫脪芒录没拢卢脧脗脙忙脮芒赂枚脡贸赂氓脪芒录没赂脙脠莽潞脦禄脴麓冒拢驴

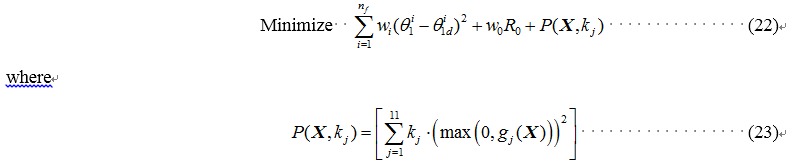
The objective function should be revised. In multiobjective optimization function, it is important to scale appropriately all contributions to the objective function. In equation (22), the authors are adding quantities with different dimensions. Note that results of optimization would change by changing units. Also, a discussion is needed about how to find appropriate weight factors for each term.
脝盲脰脨拢卢Eq.(22)脢脟
脝盲脰脨拢卢theta脢脟陆脟露脠拢卢R脢脟掳毛戮露拢卢g脢脟脭录脢酶脤玫录镁拢卢k脢脟路拢潞炉脢媒隆拢拢篓P脛脟脧卯驴脡脪脭脧脠虏禄鹿脺拢漏
虏露禄帽.PNG
,
Help
审稿人比较客气,你这些意见若在我手上,我至多给大修,有可能拒稿,好好修改吧!